
Edgerton, Harold Eugene
Artist/creator

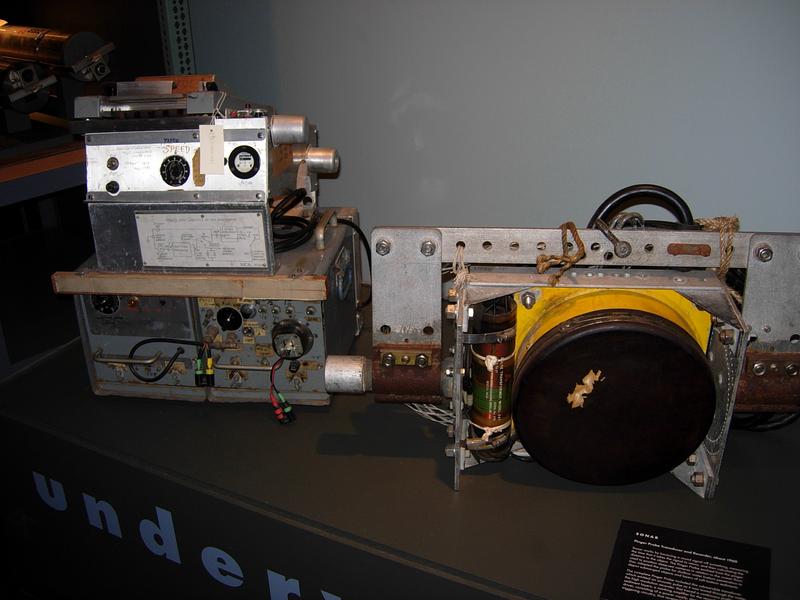
Sonar pinger portion of the Harold Edgerton's sub-bottom profiler, used to assess ocean bottom sediments.
The Pinger Probe evolved from the pinger used to position deep-sea cameras in relation to the ocean floor. Dr. Harold "Doc" Edgerton adapted the probe for shallow water bottom penetration to depict submerged objects and layers of soft bottom sediments. At first it was pointed down vertically. He fondly called it the “Mud Penetrator.” Later it was pointed sideways (horizontally) to detect objects sticking above the sea bed. The unique feature of the pinger is its comparative low frequency which allows it to penetrate mud and other sediments.
Sonar works by bouncing a sound signal off something, measuring the time that it takes the signal to return, and then calculating the distance to the object.
The apparatus consists of a sonar transducer (a modified U.S. Navy EDO UQN Echo Sounder which emitted a 12 Kilocyle (later Kilohertz) conical-shaped acoustic beam as it was towed through the wate) r; the high resolution graphic recorder, that traced a continuous profile of the sediment layers; a marking amplifier for the record; and a transducer driver, consisting of a power supply, storage capacitors, and triggering circuitry, that received the return signals.
This pinger, or mud penetrator, was used to find the Vineyard Light Ship, which went down near Buzzards Bay Light, and in the hunt for the wreck of the Medusa.
For more information, see Reprint "Sediment Penetration with a Short-Pulse Sonar" in Journal of Gedology and Petrology, Dec. 1964.
Artist/creator



